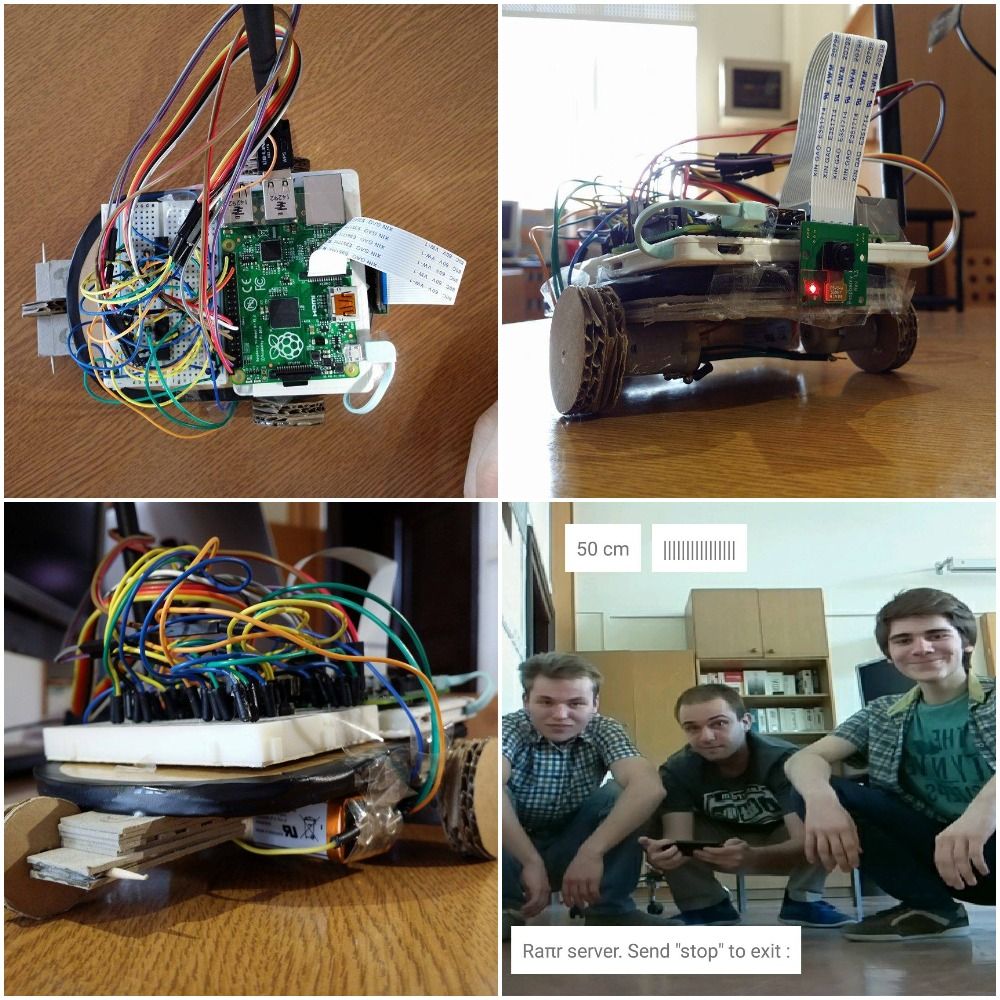
When I was in my 2nd year of bachelor studies, me and two of my friends joined forces to work on a project for a class called Multimedia Embedded Systems. While the name of the class remains cryptic for me to this day, I vividly remember the teamwork and effort we put in to make a small but functional remotely controlled robot car with a camera, Raπr.
We started the project off with an idea to make something out of the parts we had at hand - in our case it was some cardboard and a Raspberry Pi microcomputer. And as all boys do, we love ourselves some radio-controlled cars.
If you've ever seen the movie Home Alone 3, the boy there (unfortunately not played by Macaulay Culkin) taped a camera to his toy car to spy around the block - and I'm pretty sure that that idea and desire to do something like this dwells somewhere deep inside every boy.

So, the plan was on - we were to make a remotely controlled robot with a camera! But how could we accomplish this? Firstly, we had to somehow obtain everything needed for it - and that included batteries, wires as well as the camera and (our own) Raspberry Pi for working on the project outside of the class.
Thankfully, yours truly has already had a lot of electronic stuff at home after a failed attempt to make a quadcopter a year ago (I just bought a prebuilt one instead later), so I decided to share the parts with the team. After some playing around with the computer itself, we decided to head out to the electronics store to buy some missing parts of the puzzle, notably some DC toy motors and a plate we could use to connect Raspberry Pi, motors and the batteries together.
After some shopping, the game was on! We were to assemble the greatest robot car in the universe and it was going to be amazing. But, while our aspirations were quite high, the results weren't that easy to obtain: our first attempt to make something usable out of the cardboard had failed miserably. Possible reasons included the cardboard being too thin (the most probable one), us being newbies at building RC car robots and evil Martians mind controlling us to make our project worse.
Next few weeks ran by in trying to perfect the body of our robot. We experimented with different cardboard types (the ones you can buy in a store, Amazon boxes, something we had laying around at home - you name it!) and finally were able to create a good base for our robot that could actually hold its weight and even looked good!
Now, after we crossed this first barrier, we were working on our next step: the wheels. Oh my god, the wheels! Did you know that making a perfect circle out of cardboard can be a pretty hard thing to do? Well, now you do - and we felt the pain of cutting out squares, triangles, anything but circles until, after weeks of meditating at a retreat and sacrificing our hair to the Egyptian god of Sun Ra (this might or might not have happened in real life - you decide), we were finally able to make some cardboard wheels. Then we used some toothpicks to join the wheels with the main body together - and voila, the construction part was done!
After that, the only thing that was left was the actual software. We decided to split into two sub-teams, one responsible for the front end (the phone application) and the second for the back end (writing software for the robot itself). The front end team consisted of Ivan and Tsvetan - they were both really into developing mobile applications at the time so that role fit them perfectly, and the back-end consisted of me since I like developing in Python and had more experience with Raspberry Pi in general. After some work-at-home sessions, we were able to finish that as well as connect everything together - the robot was ready for the presentation day!
Wroclaw, Poland, 12:00 (or was is 15? I don't remember)
The weather was sunny on that day. (or wasn't it?) Ok, I think that it probably was sunny enough to see that we aren't vampires. We brought our robot, our pride and joy, our baby that we, as three men, could never biologically have, to the lecture room. There we saw other teams' projects - a self-watering plant, ANOTHER ROBOT CAR BUT THEY BOUGHT EVERY PART ONLINE, an alarm system or something - you know, some unimportant stuff. We were there to show our masterpiece to the world, to present everything that we were working so hard on...
...
...
"It's too heavy."
"Guys, it moves too slowly, what's wrong?"
"Oh, it must be the extra batteries - the motors can't move such a heavy machine, they're too small for that"
"Quickly, do something - we only have 10 minutes left!"
"Oh, cmon guys, let's figure it out - the other team with the pre-bought parts is already presenting their thing"
"Wait, what if we push it off the hill or something? The momentum should be enough to make it move right"
It was. And that's a story about how my friends and I had lots of fun, made a robot by ourselves and got ourselves the highest possible grade in the class.
Leadership analysis
If I were to analyze the leadership and organization of our team, I'd say that our good points were dividing the roles well and playing to each other strengths. We decided the roles based on people's desires to do different things, and that meant that every one of us was working on something that they wanted to work on - which made the overall motivation level of our team very high.
We also experimented quite a lot, iterating through many different versions of the cardboard "body" for our robot until we were able to make something that, while imperfect, worked well enough and was able to sustain the weight of the computer along with the batteries.
I guess that the main bad point of our management was not valuing the importance of having a good workplace enough. Because of that, we had to assemble everything in random points around the campus, which led us to damaging my Raspberry Pi and also leaving some permanent glue on a table in the deans' office.